|
|
|
|
A Simulation Toolkit for grasping and dexterous manipulation
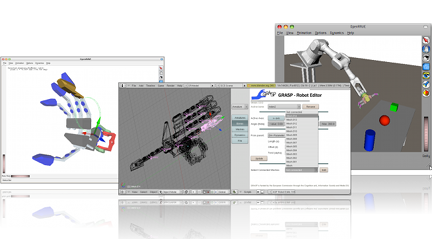
OpenGRASP [1] is an open source simulation toolkit for grasping and dexterous manipulation hosted on SourceForge. It is based on OpenRAVE modular architecture, that supports the creation and addition of new functionality and the integration of existing and widely used technologies and standards.
OpenGRASP has been developed within the GRASP project funded by the European Comunity’s Seven Framework Programme.
The toolkit consist on the following modules:
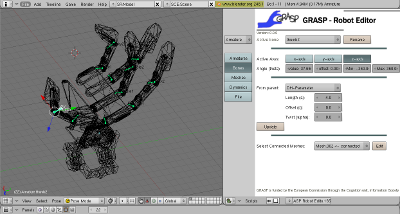
The Notes is a modelling tool that allows easily to create new or convert existing models of robot hands.
Find out more about the Robot Editor:
There are various Robots modeled with the Robot Editor and different object models that are available to download.
FISICAS is an abstraction layer for some of the most popular physics engines, providing an unified interface for them. At the moment, it supports two physics engines widely used: Bullet and ODE.
The core of the OpenGRASP simulator is OpenRAVE. Following its design, different kind of plugins have been created such as sensors, actuators and physics engines.
| [1] |
|
| [2] |
|
| [3] |
|