|
|
|
|
Important Note: Due to problems with the 2.4 branch of Blender, the software is currently restructured and ported to the newer Blender branches 2.5 and 2.6. This should resolve existing issues, result in a cleaner and better interface, and make the creation of models a lot easier (also thanks to the many improvements made by the Blender developers). The new version is expected to be finished at the end of December 2011 or in early 2012.
Contact: stefan.ulbrich at kit.edu
The Robot Editor is a modelling tool that allows easily to create new or convert existing models of robot hands. It is based on available and reliable open source software:
For the storage of models of robot manipulators and hands, we were looking for an open, extensible and already widely accepted file format that supports the definition of at least kinematics and dynamics. This is necessary in order to enable the exchange of robot models between supporting applications, leading to greater flexibility in the selection of appropriate tools.
Since version 1.5, the standard contains many useful constructs dedicated to describing kinematic chains and dynamics that can be used directly for the description of robot models. COLLADA is an XML-based file format that enables and encourages developers to extend the specification to their needs without having to violate the underlying schema definition.
In order to support specific robot features like sensors and actuators, this mechanism has been used to extend COLLADA partially using the original OpenRAVE file definition. These additions are specific to the simulator and are hidden to all other applications so that compatibility remains guaranteed. So far, basic support for COLLADA import and export has been included in the simulator.
The specification of the COLLADA format to create robot Models in Openrave can be found here.
The latest running version of the RobotEditor should be only accessed through subversion, see here.
Blender has a very consistent and productive user interface. However, as it is non-standard, it is strongly recommended to first read the official tutorials for using the Blender UI, about Blender windows and navigation in 3D space.
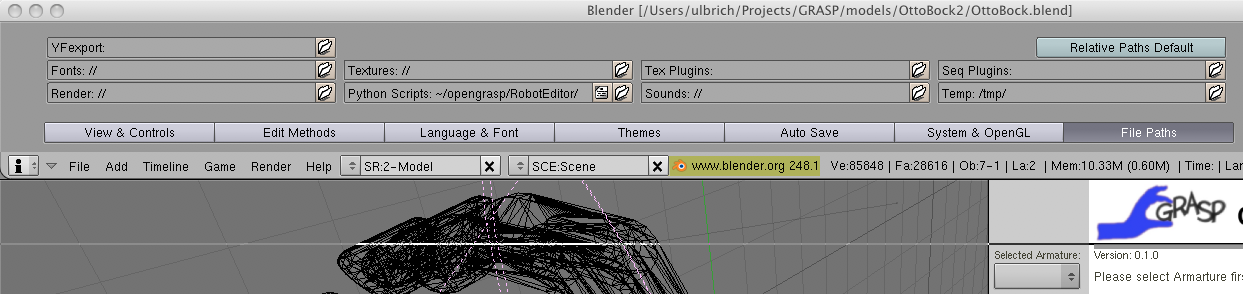
Change the folder in which Blender expects scripts to reside. This location can be entered by enlarging the user preferences window (dragging the window border) and selecting File Paths. The path has to point to the your RobotEditor/ directory. For example see the following image:
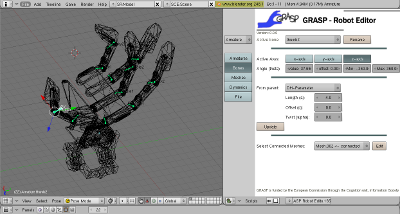
Once you changed the path you should be able to select the Robot Editor from a scripts window with Scripts > Wizards > Grasp Robot Editor, after having updated the menus: Scripts > Update Menus.

