|
|
|
|
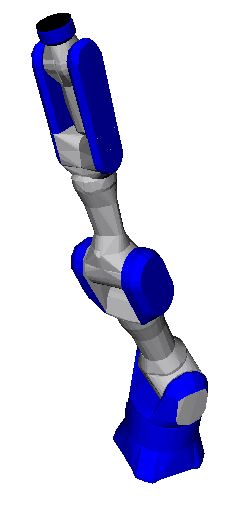
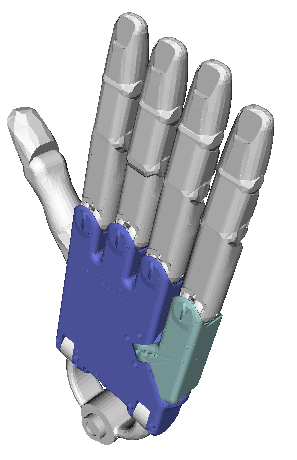
The modeling capabilities of the Notes already enable quick and easy creation of new models. So far, a selection of robot hands has been transformed into COLLADA 1.5 for use within the OpenRAVE simulator.





You can download the models from the svn repository:
https://opengrasp.svn.sourceforge.net/svnroot/opengrasp/trunk/RobotModels
Open them using OpenRAVE usign the following command:
openrave -f file.dae